 Publications
PublicationsPeriodic Error Correction
2 participants
OnStep - Forum d'astronomie :: Votre 1ère catégorie :: Echanges pour apprendre à motoriser une monture avec OnStep
Page 1 sur 1

Re: Periodic Error Correction
par tt8ed Dim 7 Oct - 22:40
Bonsoir
je n'avais pas eu le temps jusqu'à présent.
voici le fichier de mes essais avec le PEC
https://drive.google.com/open?id=1Rs71h1KuuJ4bW_LZpWLdbqmIL8kAF0vC
je suis curieux de voir les vôtres.
stéphane
je n'avais pas eu le temps jusqu'à présent.
voici le fichier de mes essais avec le PEC
https://drive.google.com/open?id=1Rs71h1KuuJ4bW_LZpWLdbqmIL8kAF0vC
je suis curieux de voir les vôtres.
stéphane
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Re: Periodic Error Correction
par koal01 Dim 26 Nov - 11:15
Tu tapes les commandes dans le moniteur de l’ide Arduino. Selon le type de commande tu peux être amener à jouer sur la vitesse de transmission de données en bas à droite, changer également le « retour chariot » en « pas de lignes ».
Pour l’installation physique tu penses pouvoir glisser l’aimant et le capteur sous ta VSF ? Tu as assez de place ?
Éventuellement entre le coupleur et la plaque du moteur ce serait possible aussi puisqu’on est dans le prolongement de la VSF, ça tourne à la même vitesse normalement et c’est plus facile à installer...?
Pour l’installation physique tu penses pouvoir glisser l’aimant et le capteur sous ta VSF ? Tu as assez de place ?
Éventuellement entre le coupleur et la plaque du moteur ce serait possible aussi puisqu’on est dans le prolongement de la VSF, ça tourne à la même vitesse normalement et c’est plus facile à installer...?
koal01- Admin
- Messages : 177
Date d'inscription : 03/09/2017
Age : 54 -

Re: Periodic Error Correction
par tt8ed Dim 26 Nov - 9:34
Bonjour
Bonne idee les codes. Question bete : ou est ce que tu tapes ces codes?
Concernant les fiches DIN je vais les utiliser pour fabriquer les cordons pour raccorder les moteurs et le boitier onstep. J avais pris des fiches avce 6 pins . Maintenant j ai besoin de 4 fils pour les moteurs et de 3 pour le pec . J envisage de faire une masse commune avec la monture pour faire le retour de la masse.
. J envisage de faire une masse commune avec la monture pour faire le retour de la masse.
Bonne idee les codes. Question bete : ou est ce que tu tapes ces codes?
Concernant les fiches DIN je vais les utiliser pour fabriquer les cordons pour raccorder les moteurs et le boitier onstep. J avais pris des fiches avce 6 pins . Maintenant j ai besoin de 4 fils pour les moteurs et de 3 pour le pec
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Re: Periodic Error Correction
par koal01 Dim 26 Nov - 7:01
Pour connaitre la valeur envoyé sur un pin il faudrait lancer un petit programme qui lirait la tension sur le pin 23.
En effet tu me l'avais demandé et j'ai oublié de regarder ça.
A moins que Onstep le fasse à partir des commandes prévues, sur le site d'Howard tu as des commandes sur le PEC tout en bas de la liste
http://www.stellarjourney.com/index.php?r=site/software_telescope
Jette un coup d'oeil
Si tu arrives, j'imagine qu'il ne te resteras plus qu'à le mettre en place sur ta monture, car j'ai vu que ta VSF était bien dégagé pour installer le capteur et l'aimant.
Très intéressant, tiens nous au courant de tes avancées, on te suit
Mourad
En effet tu me l'avais demandé et j'ai oublié de regarder ça.
A moins que Onstep le fasse à partir des commandes prévues, sur le site d'Howard tu as des commandes sur le PEC tout en bas de la liste
http://www.stellarjourney.com/index.php?r=site/software_telescope
Jette un coup d'oeil
Si tu arrives, j'imagine qu'il ne te resteras plus qu'à le mettre en place sur ta monture, car j'ai vu que ta VSF était bien dégagé pour installer le capteur et l'aimant.
Très intéressant, tiens nous au courant de tes avancées, on te suit
Mourad
koal01- Admin
- Messages : 177
Date d'inscription : 03/09/2017
Age : 54 -
Re: Periodic Error Correction
par tt8ed Dim 26 Nov - 0:49
Pour la colle, je pensais a de la Loctite ou équivalent
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Re: Periodic Error Correction
par tt8ed Dim 26 Nov - 0:45
oui c'est ca
la teensy va détecter le front descendant. Le problème sera de lui dire à partir de quelle valeur la valeur est considérée comme nulle. En fait ces capteurs ne donnent pas un tout ou rien en sortie mais une tension qui varie en fonction du champ magnétique. Donc, et ca je ne l'ai pas encore fait mais en approchant l'aimant tout doucement du capteur on doit pouvoir mesurer ces différentes valeurs au voltmètre. QUand j'ai fait mes essais j'ai trouvé que le changement était brutal mais je tenais l'aimant à la main. Dans notre cas, il tourne avec un axe, et il tourne doucement donc il va s'approcher tres lentement du capteur. le pin 23 agit comme un convertisseur analogique/numérique et associe aux différentes valeurs de tension une valeur numérique (0-1023). Je voulais donc placer le capteur sur la monture, faire tourner la VSF avec l'aimant et regarder la valeur que prend le pin23 en fonction de la position de l'aimant. J'aurai alors choisi une valeur comme étant le seuil pour lequel le niveau est considéré comme bas. Il y a la possibilité de définir la valeur du seuil dans le config.h. C'est pourquoi je t'avais demandé la méthode pour lire en direct la valeur des pins. Je crois que c'est possible avec la console mais je n'ai pas essayé.
L'index permet au soft de savoir ou en est la vis sans fin, le soft se contente de lire les corrections qui sont apportées pendant tout l'enregistrement. Tu peux le faire à la main avec un oculaire réticulé et la commande manuelle (l'appli android ou une commande branchée sur le port ST4), mais c'est bien ch... Donc tu utilises un soft de guidage qui donne des instructions a ta monture pour rester centré sur ton objet et Onstep enregistre ces commandes. Ensuite elle restituera au bon moment (elle accélérera ou freinera le RA) ces corrections car elle saura ou se trouve la VSF grace a l'aimant et au capteur.
est-ce clair?
la teensy va détecter le front descendant. Le problème sera de lui dire à partir de quelle valeur la valeur est considérée comme nulle. En fait ces capteurs ne donnent pas un tout ou rien en sortie mais une tension qui varie en fonction du champ magnétique. Donc, et ca je ne l'ai pas encore fait mais en approchant l'aimant tout doucement du capteur on doit pouvoir mesurer ces différentes valeurs au voltmètre. QUand j'ai fait mes essais j'ai trouvé que le changement était brutal mais je tenais l'aimant à la main. Dans notre cas, il tourne avec un axe, et il tourne doucement donc il va s'approcher tres lentement du capteur. le pin 23 agit comme un convertisseur analogique/numérique et associe aux différentes valeurs de tension une valeur numérique (0-1023). Je voulais donc placer le capteur sur la monture, faire tourner la VSF avec l'aimant et regarder la valeur que prend le pin23 en fonction de la position de l'aimant. J'aurai alors choisi une valeur comme étant le seuil pour lequel le niveau est considéré comme bas. Il y a la possibilité de définir la valeur du seuil dans le config.h. C'est pourquoi je t'avais demandé la méthode pour lire en direct la valeur des pins. Je crois que c'est possible avec la console mais je n'ai pas essayé.
L'index permet au soft de savoir ou en est la vis sans fin, le soft se contente de lire les corrections qui sont apportées pendant tout l'enregistrement. Tu peux le faire à la main avec un oculaire réticulé et la commande manuelle (l'appli android ou une commande branchée sur le port ST4), mais c'est bien ch... Donc tu utilises un soft de guidage qui donne des instructions a ta monture pour rester centré sur ton objet et Onstep enregistre ces commandes. Ensuite elle restituera au bon moment (elle accélérera ou freinera le RA) ces corrections car elle saura ou se trouve la VSF grace a l'aimant et au capteur.
est-ce clair?
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Re: Periodic Error Correction
par koal01 Dim 26 Nov - 0:23
Je veux bien que tu me donnes la marque de ta colle pour coller l'aimant ???
Donc en fait le pin 3 du capteur est connecté au pin 23 de la Teensy où on a une tension de 3.3 v avec le pullup de 10 k sauf quand la vis passe devant l'aimant qui fait baisser la tension à 0 , c'est ça ?
Il faut prévoir un connecteur din à 3 fils (5V, GND et pin 23) ? pourquoi dis tu que tu avais prévu des DIN a 6 fils et qu'il te manque un fil pour le capteur ?
Au niveau soft hormis la modification dans config.h j'imagine que dans Phd guiding ou Sky Planetarium on doit rentrer les caractéristiques spécifiques de la vis sans fin de notre monture.
Tu sais quels sont ces paramètres ? J'ai besoin de comprendre comment le logiciel "détecte" le décalage entre la cible et la rotation de la vis sans fin.
Car c'est bien la caméra et le logiciel de guidage qui envoient à onstep des instructions pour accélérer ou diminuer la vitesse du tracking mais à partir de quel constat ?
Donc en fait le pin 3 du capteur est connecté au pin 23 de la Teensy où on a une tension de 3.3 v avec le pullup de 10 k sauf quand la vis passe devant l'aimant qui fait baisser la tension à 0 , c'est ça ?
Il faut prévoir un connecteur din à 3 fils (5V, GND et pin 23) ? pourquoi dis tu que tu avais prévu des DIN a 6 fils et qu'il te manque un fil pour le capteur ?
Au niveau soft hormis la modification dans config.h j'imagine que dans Phd guiding ou Sky Planetarium on doit rentrer les caractéristiques spécifiques de la vis sans fin de notre monture.
Tu sais quels sont ces paramètres ? J'ai besoin de comprendre comment le logiciel "détecte" le décalage entre la cible et la rotation de la vis sans fin.
Car c'est bien la caméra et le logiciel de guidage qui envoient à onstep des instructions pour accélérer ou diminuer la vitesse du tracking mais à partir de quel constat ?
koal01- Admin
- Messages : 177
Date d'inscription : 03/09/2017
Age : 54 -
Re: Periodic Error Correction
par tt8ed Sam 25 Nov - 23:17
Bonsoir
content que vous ayez reçu le petit matériel. Oui, j'ai mis deux exemplaires au cas ou.. en cas d'erreur ou pour faire un deuxième montage.
pour la fixation, je pense qu'un point de colle derrière l'aimant qui sera mis sur la VSF sera bien suffisant. Quand au capteur, il faut poser sur la platine (colle?) à la bonne distance pour qu'il soit sensible au champ de l'aimant. Il faut également paramétrer le config.h en PEC_SENSE_STATE LOW (et non pas HIGH) car nous sommes sur un front descendant.
Mon problème est que j'avais prévu des DIN a 6 fils et que donc il me manque un fil pour le capteur. (a moins de raccorder la masse à la monture)
pour le PCB, il faut vraiment que nous en parlions, je suis naturellement partant. Il faut que j'étudie le schéma. On se fixe une date pour s'organiser?
aujourd'hui, j'ai redémonté les moteurs et enlevé les absorbeurs de choc. En effet, si l'idée me paraissait bonne a l'origine j'ai passé beaucoup de temps a regarder et écouter les moteurs. Il se trouve qu'a certains moments ils oscillaient. J'ai compris que les points durs de la transmission roue dentée et vis sans fin provoquaient ces oscillations et que donc comme le moteur se déplace, il y a obligatoirement variation de la vitesse. J'ai donc préféré faire un montage direct qui sera plus sensible au couple de démarrage et de freinage. En regardant les courbes "step " à l'oscillo, on voit que le soft gére des phases d'accélération et de freinage donc je pense que les accoups seront limités. par contre j'ai regraissé la VSF et la roue dentée pour limiter les point durs et jai décidé de laisser la vitesse a 2.4°/sec, ce qui est amplement suffisant à mon avis.
j'ai hate de faire tourner le système à l'air libre
content que vous ayez reçu le petit matériel. Oui, j'ai mis deux exemplaires au cas ou.. en cas d'erreur ou pour faire un deuxième montage.
pour la fixation, je pense qu'un point de colle derrière l'aimant qui sera mis sur la VSF sera bien suffisant. Quand au capteur, il faut poser sur la platine (colle?) à la bonne distance pour qu'il soit sensible au champ de l'aimant. Il faut également paramétrer le config.h en PEC_SENSE_STATE LOW (et non pas HIGH) car nous sommes sur un front descendant.
Mon problème est que j'avais prévu des DIN a 6 fils et que donc il me manque un fil pour le capteur. (a moins de raccorder la masse à la monture)
pour le PCB, il faut vraiment que nous en parlions, je suis naturellement partant. Il faut que j'étudie le schéma. On se fixe une date pour s'organiser?
aujourd'hui, j'ai redémonté les moteurs et enlevé les absorbeurs de choc. En effet, si l'idée me paraissait bonne a l'origine j'ai passé beaucoup de temps a regarder et écouter les moteurs. Il se trouve qu'a certains moments ils oscillaient. J'ai compris que les points durs de la transmission roue dentée et vis sans fin provoquaient ces oscillations et que donc comme le moteur se déplace, il y a obligatoirement variation de la vitesse. J'ai donc préféré faire un montage direct qui sera plus sensible au couple de démarrage et de freinage. En regardant les courbes "step " à l'oscillo, on voit que le soft gére des phases d'accélération et de freinage donc je pense que les accoups seront limités. par contre j'ai regraissé la VSF et la roue dentée pour limiter les point durs et jai décidé de laisser la vitesse a 2.4°/sec, ce qui est amplement suffisant à mon avis.
j'ai hate de faire tourner le système à l'air libre
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Re: Periodic Error Correction
par koal01 Sam 25 Nov - 17:52
Bonjour les gars,
Merci Stéphane pour ton tuto sur le PEC, j'espère vraiment apprendre à l'utiliser et à réussir à le mettre en place.
En tous cas tu as vraiment fait du beau travail et je t'en remercie !
Avant d'en parler, juste quelques mots sur les changements récents.
Mon prototype avec la 3.6 est presque terminé, j'attends un connecteur pour le 12V.
J'ai toujours mes problèmes de vibrations au-delà de 1,8 °/sec car je n'ai toujours pas reçu les absorbeurs de chocs, la Chine c'est bien mais c'est loin.
Côté Onstep, Howard a mis fin ou presque au groupe Yahoo pour des raisons d'ergonomie principalement, il faut maintenant s'inscrire sur le nouveau groupe Groups.io qui a l'air bien plus sympa, il a envoyé des liens personnalisés à tout le monde le 23 novembre pour passer sur le nouveau site. Donc il faut penser à s'inscrire si vous voulez continuer à suivre les discussions sur les évolutions sur Onstep. Et il y en a des évolutions car le premier post d' Howard concernait la mise à disposition des schémas sur EasyEda des circuits OnStep Max et Onstep Mini + les composants.
C'est franchement une vraie opportunité pour vous deux car vous n'avez pas fait de montage avancé avec la Teensy 3.6, un bel enchaînement en perspective !
Bon, Il faudra qu'on aborde ce point dans la rubrique en question sur qui fait quoi ou plutôt qui peut faire quoi.
La correction de l'erreur périodique. Venons-en ! On est d'accord pour essayer d'intégrer cette option à notre système.
Pour moi le principe est compris mais la technique pour le mettre en place reste abstraite malgré la présentation très claire de Stéphane.
On a reçu de notre expert en PEC deux aimants et deux capteurs, merci Stéphane !!!!! Si tu as mis deux aimants et deux capteurs c'est pour la sécurité je suppose car pour l'intégration un seul aimant et un seul capteur sont nécessaires il me semble.
Je ne sais pas comment Philippe voit la chose pour poser ces éléments ? quid du capteur à effet Hall ?
Je me suis amusé à poser l'aimant sur le capot mais j'ai comme l'impression qu'une modification sur la monture est nécessaire pour fixer tout cela correctement. Tu peux nous éclairer encore un peu Stéphane ?
... 1 heure plus tard
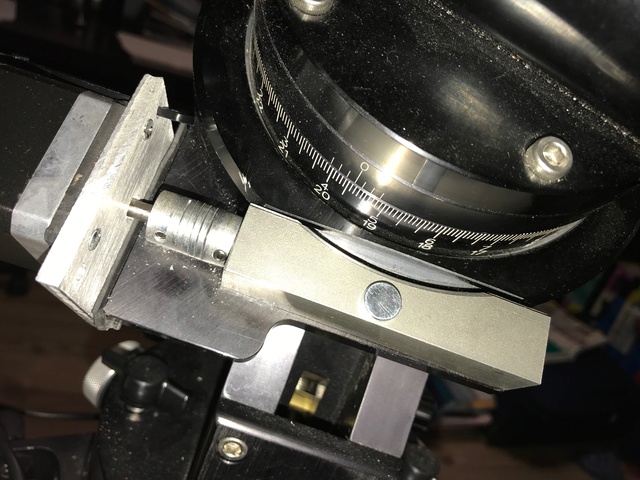
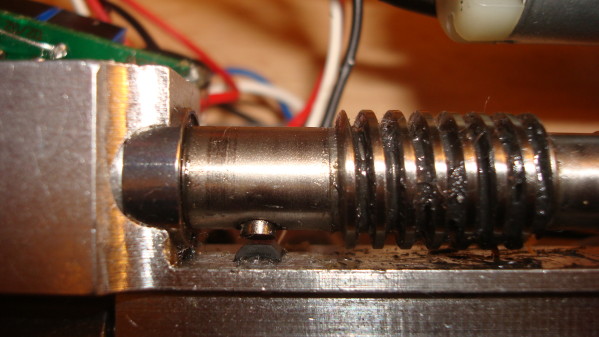
J'ai fouillé un peu sur la toile et j'ai trouvé deux photos ci-dessous d'un montage d'un capteur et de l'aimant sur une vis sans fin.
Sur la première photo on voit l'aimant au-dessus du capteur collé et dans la deuxième on voit le capteur et ses 3 pins
Tu penses Stéphane qu'il faut s'inspirer de ce genre de montage ? ou penses tu à autre chose ?
Tout cela signifie qu'il faut démonter pas mal de petites choses pour faire cette installation ? Dans l'exemple il a perforé l'arbre de la vis sans fin pour visser l'aimant à l'axe
On voit d'ailleurs la tête de la vis sur la photo n°2

Bon ciel à vous
Merci Stéphane pour ton tuto sur le PEC, j'espère vraiment apprendre à l'utiliser et à réussir à le mettre en place.
En tous cas tu as vraiment fait du beau travail et je t'en remercie !
Avant d'en parler, juste quelques mots sur les changements récents.
Mon prototype avec la 3.6 est presque terminé, j'attends un connecteur pour le 12V.
J'ai toujours mes problèmes de vibrations au-delà de 1,8 °/sec car je n'ai toujours pas reçu les absorbeurs de chocs, la Chine c'est bien mais c'est loin.
Côté Onstep, Howard a mis fin ou presque au groupe Yahoo pour des raisons d'ergonomie principalement, il faut maintenant s'inscrire sur le nouveau groupe Groups.io qui a l'air bien plus sympa, il a envoyé des liens personnalisés à tout le monde le 23 novembre pour passer sur le nouveau site. Donc il faut penser à s'inscrire si vous voulez continuer à suivre les discussions sur les évolutions sur Onstep. Et il y en a des évolutions car le premier post d' Howard concernait la mise à disposition des schémas sur EasyEda des circuits OnStep Max et Onstep Mini + les composants.
C'est franchement une vraie opportunité pour vous deux car vous n'avez pas fait de montage avancé avec la Teensy 3.6, un bel enchaînement en perspective !
Bon, Il faudra qu'on aborde ce point dans la rubrique en question sur qui fait quoi ou plutôt qui peut faire quoi.
La correction de l'erreur périodique. Venons-en ! On est d'accord pour essayer d'intégrer cette option à notre système.
Pour moi le principe est compris mais la technique pour le mettre en place reste abstraite malgré la présentation très claire de Stéphane.
On a reçu de notre expert en PEC deux aimants et deux capteurs, merci Stéphane !!!!! Si tu as mis deux aimants et deux capteurs c'est pour la sécurité je suppose car pour l'intégration un seul aimant et un seul capteur sont nécessaires il me semble.
Je ne sais pas comment Philippe voit la chose pour poser ces éléments ? quid du capteur à effet Hall ?
Je me suis amusé à poser l'aimant sur le capot mais j'ai comme l'impression qu'une modification sur la monture est nécessaire pour fixer tout cela correctement. Tu peux nous éclairer encore un peu Stéphane ?
... 1 heure plus tard
J'ai fouillé un peu sur la toile et j'ai trouvé deux photos ci-dessous d'un montage d'un capteur et de l'aimant sur une vis sans fin.
Sur la première photo on voit l'aimant au-dessus du capteur collé et dans la deuxième on voit le capteur et ses 3 pins
Tu penses Stéphane qu'il faut s'inspirer de ce genre de montage ? ou penses tu à autre chose ?
Tout cela signifie qu'il faut démonter pas mal de petites choses pour faire cette installation ? Dans l'exemple il a perforé l'arbre de la vis sans fin pour visser l'aimant à l'axe
On voit d'ailleurs la tête de la vis sur la photo n°2
Bon ciel à vous
koal01- Admin
- Messages : 177
Date d'inscription : 03/09/2017
Age : 54 -
Re: Periodic Error Correction
par tt8ed Lun 20 Nov - 9:36
https://drive.google.com/file/d/18HuIgKUc2B64z6AoPtodId_Ipi72Lww0/view?usp=sharing
je mets le lien du schéma, car mon explorateur refuse d'accéder au site pour héberger les images...
tous ces gens qui mettent des protections de partout ça commence a fatiguer
stéphane
je mets le lien du schéma, car mon explorateur refuse d'accéder au site pour héberger les images...
tous ces gens qui mettent des protections de partout ça commence a fatiguer
stéphane
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Re: Periodic Error Correction
par tt8ed Lun 20 Nov - 9:30
etrange
le schéma que j'avais mis hier soir a disparu.....
le schéma que j'avais mis hier soir a disparu.....
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Re: Periodic Error Correction
par tt8ed Lun 20 Nov - 0:10
https://drive.google.com/file/d/1MsyqBTuHzIneLaopVsB-pmcSsZmKa8ew/view?usp=sharing
j'ai mis un lien vers une video ou l'on voit en pratique le fonctionnement
j'ai cablé comme sur le schéma. La tension qui est lue est celle de la sortie donc celle qui est connecté au pin de la Teensy.
on voit que j'ai choisi une tension de Pullup de 3.3v.
donc au repos le pin est alimenté en +3v puis lorsque je simule le passage de l'index (c'est un aimant) la sortie du capteur est mise a la masse et amène le pin à 0.
le changement a l'air assez brutal.
stéphane
j'ai mis un lien vers une video ou l'on voit en pratique le fonctionnement
j'ai cablé comme sur le schéma. La tension qui est lue est celle de la sortie donc celle qui est connecté au pin de la Teensy.
on voit que j'ai choisi une tension de Pullup de 3.3v.
donc au repos le pin est alimenté en +3v puis lorsque je simule le passage de l'index (c'est un aimant) la sortie du capteur est mise a la masse et amène le pin à 0.
le changement a l'air assez brutal.
stéphane
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Re: Periodic Error Correction
par tt8ed Dim 19 Nov - 23:17
le truc sympa est que le composant est sensé ne fonctionner qu'a partir de 4.4v mais les essais que j'ai fais montrent qu'il fonctionne très bien avec une alimentation de 3.3v
sans le pull up l'etat de sortie est de 1.75v et je ne sais pas si c'est une tension qui permet de définir clairement un état pour la Teensy.
autre bonne nouvelle: dans les jours qui viennent, je fais partir à vos adresses respectives deux enveloppes qui contiennent aimant et capteur de hall.
si j'arrive a l'importer je mets la video en partage
stéphane
sans le pull up l'etat de sortie est de 1.75v et je ne sais pas si c'est une tension qui permet de définir clairement un état pour la Teensy.
autre bonne nouvelle: dans les jours qui viennent, je fais partir à vos adresses respectives deux enveloppes qui contiennent aimant et capteur de hall.
si j'arrive a l'importer je mets la video en partage
stéphane
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse

tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
Periodic Error Correction
par tt8ed Dim 19 Nov - 23:00
J ai conduits quelques essais ce soir qui sont encourageants
J'ai donc décidé d'ouvrir un post pour ce beau sujet qu'est le PEC
Je vais tout d'abord recopier ce que j'avais écrit dans un de mes posts:
PEC : se raccorde sur le pin 23. J'ai cherché pas mal de temps ce que l'on pouvait raccorder à ce Pin et pourquoi. En relisant le configH et le pin maps, je suis arrivé à la conclusion qu'il s'agit de brancher un capteur magnétique qui va délivrer une état électrique à chaque fois qu'il sera excité et qui sera mesuré par le pin 23 du Tensy. cela signifie qu'il faut mettre un aimant sur l'axe RA ou sur la VSF et mesurer la régularité de la rotation.
C'est une sorte de correction en "live" de l'Erreur Périodique en régulant la vitesse du moteur.
Voila comment cela fonctionne.
Le programme d’howard comprend une fonction dite PEC (Periodic Error Correction). Vous savez ce qu’est l’erreur périodique naturellement (sinon levez le doigt) et certaines monture dont la mienne actuellement ont un système pour la compenser. Je le dis tout de suite, je ne l’ai jamais utilisé car il n’est pas pratique du tout, l’enregistrement de l’erreur devant se faire a la main.
Le principe est le suivant. Une monture équatoriale met en jeu un système de rotation de l’axe RA afin de compenser la rotation de la terre. Ce système n’est pas parfait par définition et principalement du au fait des jeux et de la qualité de l’usinage des pièces mécaniques. La pièce la plus sensible à la qualité de l’usinage est la vis sans fin. Ces défauts génèrent des défauts de suivi (avance ou retard sur la vitesse sidérale) qui sont mesurables et qui se reproduisent suivant une certaine période, période qui est de l’ordre de grandeur de la durée d’un tour de VSF.
Le principe du PEC est donc le suivant. On effectue le monitoring d’une étoile pendant un ou plusieurs tours de VSF et on mesure les déplacements en RA de cette étoile par rapport à la position de départ. Ces écarts sont moyennés et enregistrés dans le soft de la Tensy et ensuite en suivi cette dernière donne au moteur RA des ordres d’accélération ou de freinage suivant l’écart attendu afin de compenser ces défauts de qualité. Ce monitoring s’effectue avec une caméra et un soft du type PHD Guiding ou autre et même skyplanetarium.
Afin de corréler l’erreur enregistrée avec la position de la vis sans fin. Deux moyens :
- Positionner la monture de façon à connaître l’état de la VSF et de lancer le PEC au bon moment
- Corréler la position de la VSF et du PEC garce à un index. Sur le principe c’est un capteur a effet HALL . Je vais mettre un schéma du montage. Il faut coller un aimant sur l’axe de la VSF, ce dernier passe devant le capteur et lance soit l’enregistrement des données soit leur restitution. Il y a possibilité d’enregistrer une première fois de stocker, puis d’enregistrer par-dessus l’erreur déjà enregistré afin de moyenner la correction.
C’est une super fonction, a câbler absolument. Il y a un gain de plusieurs secondes d’arc a attendre.
J'ai donc décidé d'ouvrir un post pour ce beau sujet qu'est le PEC
Je vais tout d'abord recopier ce que j'avais écrit dans un de mes posts:
PEC : se raccorde sur le pin 23. J'ai cherché pas mal de temps ce que l'on pouvait raccorder à ce Pin et pourquoi. En relisant le configH et le pin maps, je suis arrivé à la conclusion qu'il s'agit de brancher un capteur magnétique qui va délivrer une état électrique à chaque fois qu'il sera excité et qui sera mesuré par le pin 23 du Tensy. cela signifie qu'il faut mettre un aimant sur l'axe RA ou sur la VSF et mesurer la régularité de la rotation.
C'est une sorte de correction en "live" de l'Erreur Périodique en régulant la vitesse du moteur.
Voila comment cela fonctionne.
Le programme d’howard comprend une fonction dite PEC (Periodic Error Correction). Vous savez ce qu’est l’erreur périodique naturellement (sinon levez le doigt) et certaines monture dont la mienne actuellement ont un système pour la compenser. Je le dis tout de suite, je ne l’ai jamais utilisé car il n’est pas pratique du tout, l’enregistrement de l’erreur devant se faire a la main.
Le principe est le suivant. Une monture équatoriale met en jeu un système de rotation de l’axe RA afin de compenser la rotation de la terre. Ce système n’est pas parfait par définition et principalement du au fait des jeux et de la qualité de l’usinage des pièces mécaniques. La pièce la plus sensible à la qualité de l’usinage est la vis sans fin. Ces défauts génèrent des défauts de suivi (avance ou retard sur la vitesse sidérale) qui sont mesurables et qui se reproduisent suivant une certaine période, période qui est de l’ordre de grandeur de la durée d’un tour de VSF.
Le principe du PEC est donc le suivant. On effectue le monitoring d’une étoile pendant un ou plusieurs tours de VSF et on mesure les déplacements en RA de cette étoile par rapport à la position de départ. Ces écarts sont moyennés et enregistrés dans le soft de la Tensy et ensuite en suivi cette dernière donne au moteur RA des ordres d’accélération ou de freinage suivant l’écart attendu afin de compenser ces défauts de qualité. Ce monitoring s’effectue avec une caméra et un soft du type PHD Guiding ou autre et même skyplanetarium.
Afin de corréler l’erreur enregistrée avec la position de la vis sans fin. Deux moyens :
- Positionner la monture de façon à connaître l’état de la VSF et de lancer le PEC au bon moment
- Corréler la position de la VSF et du PEC garce à un index. Sur le principe c’est un capteur a effet HALL . Je vais mettre un schéma du montage. Il faut coller un aimant sur l’axe de la VSF, ce dernier passe devant le capteur et lance soit l’enregistrement des données soit leur restitution. Il y a possibilité d’enregistrer une première fois de stocker, puis d’enregistrer par-dessus l’erreur déjà enregistré afin de moyenner la correction.
C’est une super fonction, a câbler absolument. Il y a un gain de plusieurs secondes d’arc a attendre.
tt8ed- Messages : 195
Date d'inscription : 03/09/2017
Age : 57
Localisation : chateauneuf de Grasse
OnStep - Forum d'astronomie :: Votre 1ère catégorie :: Echanges pour apprendre à motoriser une monture avec OnStep
Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum|
|
|